
Laboratory Animal and Comparative Medicine ›› 2026, Vol. 46 ›› Issue (2): 279-287.DOI: 10.12300/j.issn.1674-5817.2025.101
• Educational and Teaching Practices • Previous Articles Next Articles
LIU Yishu1( ), CAI Liping2()(
), CAI Liping2()( )
)
Received:2025-07-01
Revised:2025-10-07
Online:2026-04-25
Published:2026-04-18
Contact:
CAI Liping
CLC Number:
LIU Yishu,CAI Liping. Analysis of Current Practices and Exploration of Alternative Technologies in Use of Laboratory Animals for Minimally Invasive Surgery Education and Training[J]. Laboratory Animal and Comparative Medicine, 2026, 46(2): 279-287. DOI: 10.12300/j.issn.1674-5817.2025.101.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.slarc.org.cn/dwyx/EN/10.12300/j.issn.1674-5817.2025.101
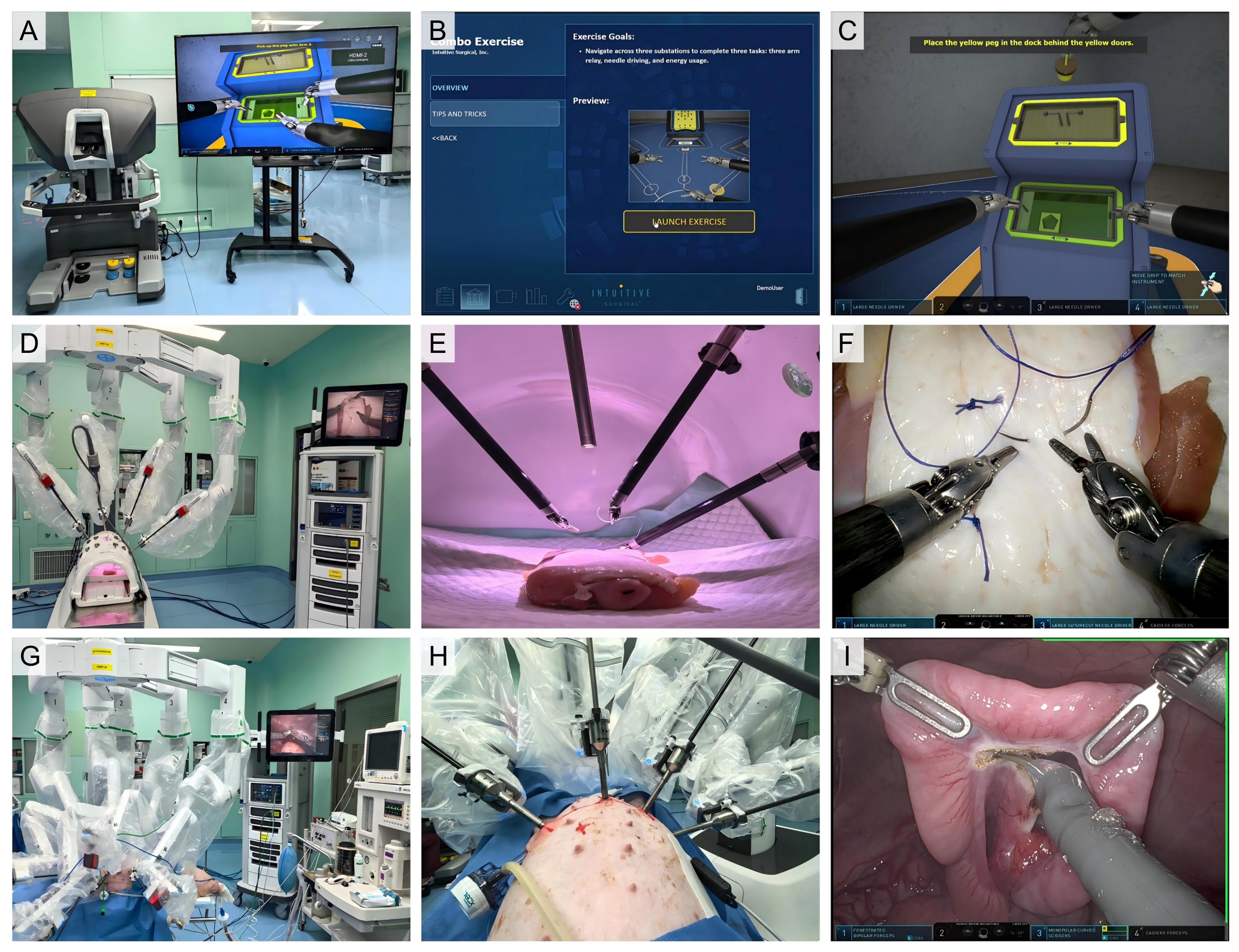
Figure 1 Da Vinci Xi Surgical System tiered training pathway

Figure 2 Laparoscopic surgical training program
| [1] | STARR R A, WAGSTAFF N V. Implementing a surgical skills training program[J]. Obstet Gynecol Clin North Am, 2006, 33(2):247-258. DOI: 10.1016/j.ogc.2006.01.006 . |
| [2] | WANG Z, SHEN J. Simulation training in spine surgery[J]. J Am Acad Orthop Surg, 2022, 30(9):400-408. DOI: 10.5435/JAAOS-D-21-00756 . |
| [3] | KÜTTNER-MAGALHÃES R, PIMENTEL-NUNES P, ARAÚJO-MARTINS M, et al. Endoscopic submucosal dissection (ESD): how do Western endoscopists value animal models [J]. Scand J Gastroenterol, 2021, 56(4):492-497. DOI: 10.1080/00365521.2021.1879251 . |
| [4] | GRIECO M, ELMORE U, VIGNALI A, et al. Surgical training for transanal total mesorectal excision in a live animal model: a preliminary experience[J]. J Laparoendosc Adv Surg Tech A, 2022, 32(8):866-870. DOI: 10.1089/lap.2021.0845 . |
| [5] | JARA R D, GUERRÓN A D, PORTENIER D. Complications of robotic surgery[J]. Surg Clin North Am, 2020, 100(2):461-468. DOI: 10.1016/j.suc.2019.12.008 . |
| [6] | KALAN S, CHAUHAN S, COELHO R F, et al. History of robotic surgery[J]. J Rob Surg, 2010, 4(3):141-147. DOI: 10.1007/s11701-010-0202-2 . |
| [7] | LEAL GHEZZI T, CAMPOS CORLETA O. 30 years of robotic surgery[J]. World J Surg, 2016, 40(10):2550-2557. DOI: 10.1007/s00268-016-3543-9 . |
| [8] | HERRON D M, MAROHN M. A consensus document on robotic surgery[J]. Surg Endosc, 2008, 22(2):313-325. DOI: 10.1007/s00464-007-9727-5 . |
| [9] | CHEN R, RODRIGUES ARMIJO P, KRAUSE C, et al. A comprehensive review of robotic surgery curriculum and training for residents, fellows, and postgraduate surgical education[J]. Surg Endosc, 2020, 34(1):361-367. DOI: 10.1007/s00464-019-06775-1 . |
| [10] | 刘意抒, 蔡丽萍. 实验猪在达芬奇手术机器人培训中的应用进展及挑战[J]. 实验动物与比较医学, 2024, 44(6):667-674. DOI: 10.12300/j.issn.1674-5817.2024.075 . |
| LIU Y S, CAI L P. Advances and challenges of using experimental pigs in da vinci surgical robot training[J]. Lab Anim Comp Med, 2024, 44(6):667-674. DOI: 10.12300/j.issn.1674-5817.2024.075 . | |
| [11] | 李建萍, 刘意抒, 蔡丽萍, 等. 达芬奇手术机器人国际培训中心建设[J]. 解放军医院管理杂志, 2017, 24(12):1156-1158. DOI: 10.16770/j.cnki.1008-9985.2017.12.016 . |
| LI J P, LIU Y S, CAI L P, et al. Construction of the da vinci surgical robot international training center[J]. Hosp Adm J Chin People's Liberation Army, 2017, 24(12):1156-1158. DOI: 10.16770/j.cnki.1008-9985.2017.12.016 . | |
| [12] | ULLOA G, NEYEM A, ESCALONA G, et al. Remote asynchronous feedback for unsupervised laparoscopic training: the "Lapp" platform[J]. Arq Bras Cir Dig, 2023, 35: e1712. DOI: 10.1590/0102-672020220002e1712 . |
| [13] | TANG J Z, XU L, HE L J, et al. Virtual laparoscopic training system based on VCH model[J]. J Med Syst, 2017, 41(4):58. DOI: 10.1007/s10916-017-0702-y . |
| [14] | 王悦, 赵宇, 陈凯婷, 等. SBML教学法在妇产科住院医师腹腔镜培训中的应用[J]. 全科医学临床与教育, 2024, 22(11):1008-1010. DOI: 10.13558/j.cnki.issn1672-3686.2024.011.014 . |
| WANG Y, ZHAO Y, CHEN K T, et al. Application of simulation-based mastery learning teaching method in laparoscopic training of obstetrics and gynecology residents[J]. Clin Educ Gen Pract, 2024, 22(11):1008-1010. DOI: 10.13558/j.cnki.issn1672-3686.2024.011.014 . | |
| [15] | 林文雪, 刘三微, 陈雷, 等. 基于教学视频的自我调节学习模式在实习医生腹腔镜模拟培训中的应用[J]. 腹腔镜外科杂志, 2024, 29(11):858-863. DOI: 10.13499/j.cnki.fqjwkzz.2024.11.858 . |
| LIN W X, LIU S W, CHEN L, et al. Application of self-regulated learning based on instructional videos in laparoscopic simulation training for intern physicians[J]. J Laparosc Surg, 2024, 29(11):858-863. DOI: 10.13499/j.cnki.fqjwkzz.2024.11.858 . | |
| [16] | 汪成合, 郭健, 何威, 等. 基于OBE的持镜助手培训在腹腔镜前列腺癌根治术临床教学中的应用[J]. 中国毕业后医学教育, 2025, 9(1):42-45. DOI: 10.3969/j.issn.2096-4293.2025.01.010 . |
| WANG C H, GUO J, HE W, et al. Application of OBE-based camera holders training in clinical teaching of laparoscopic radical prostatectomy[J]. Chin J Graduate Med Educ, 2025, 9(1):42-45. DOI: 10.3969/j.issn.2096-4293.2025.01.010 . | |
| [17] | 董德鑫, 王文达. 3D数字化技术在泌尿外科腹腔镜操作培训中的初步应用[J]. 基础医学与临床, 2024, 44(9):1328-1330. DOI: 10.16352/j.issn.1001-6325.2024.09.1328 . |
| DONG D X, WANG W D. Preliminary application of 3D digital technology in laparoscopic operation training in urology[J]. Basic Clin Med, 2024, 44(9):1328-1330. DOI: 10.16352/j.issn.1001-6325.2024.09.1328 . | |
| [18] | CRUZ J A S DA, PASSEROTTI C C, FRATI R M C, et al. Surgical performance during laparoscopic radical nephrectomy is improved with training in a porcine model[J]. J Endourol, 2012, 26(3): 278-282. DOI: 10.1089/end.2011.0367 . |
| [19] | KIRLUM H J, HEINRICH M, TILLO N, et al. Advanced paediatric laparoscopic surgery: repetitive training in a rabbit model provides superior skills for live operations[J]. Eur J Pediatr Surg, 2005, 15(3):149-152. DOI: 10.1055/s-2005-837600 . |
| [20] | ESPOSITO C, ESCOLINO M, DRAGHICI I, et al. Training models in pediatric minimally invasive surgery: rabbit model versus porcine model: a comparative study[J]. J Laparoendosc Adv Surg Tech A, 2016, 26(1):79-84. DOI: 10.1089/lap.2015.0229 . |
| [21] | KIRLUM H J, HEINRICH M, TILL H. The rabbit model serves as a valuable operative experience and helps to establish new techniques for abdominal and thoracic endosurgery[J]. Pediatr Surg Int, 2005, 21(2):91-93. DOI: 10.1007/s00383-004-1330-4 . |
| [22] | FRANSSON B A, RAGLE C A, MICKAS M M, et al. Ability to perform laparoscopic intra- and extracorporeal suture ligations in a live canine ovariectomy model after simulation training[J]. J Vet Med Educ, 2022: 305-313. DOI: 10.3138/jvme-2021-0143 . |
| [23] | ANDRADE-ESPINOZA B, OVIEDO-PEÑATA C, MALDONADO-ESTRADA J G. Use of a composed simulator by veterinarian non-experts in minimally invasive surgery for training and acquisition of surgical skills for laparoscopic ovariectomy in dogs[J]. Animals, 2023, 13(17):2698. DOI: 10.3390/ani13172698 . |
| [24] | FRENCH E D, GRIFFON D J, KASS P H, et al. Evaluation of a laparoscopic abdominal simulator assessment to test readiness for laparoscopic ovariectomy in live dogs[J]. Vet Surg, 2021, 50(): O49-O66. DOI: 10.1111/vsu.13604 . |
| [25] | STEIN M, ELEFTERIOU F, BUSSE B, et al. Why animal experiments are still indispensable in bone research: a statement by the European calcified tissue society[J]. J Bone Miner Res, 2023, 38(8):1045-1061. DOI: 10.1002/jbmr.4868 . |
| [26] | 蔡卜磊, 张于凡, 杨璐颖, 等. 现代战争背景下VR颌面战创伤急救培训系统的开发与运用[J]. 空军军医大学学报, 2023, 14(9):834-838, 843. DOI: 10.13276/j.issn.2097-1656.2023.09.008 . |
| CAI B L, ZHANG Y F, YANG L Y, et al. Development and application of virtual reality technology in first aid training of maxillofacial war wounds[J]. J Air Force Med Univ, 2023, 14(9):834-838, 843. DOI: 10.13276/j.issn.2097-1656.2023.09.008 . | |
| [27] | 高婷婷, 师增增, 杨潇, 等. 妇科腹腔镜手术技能培训引入VR技术的评估与思考[J]. 医学教育研究与实践, 2021, 29(4):642-645. DOI: 10.13555/j.cnki.c.m.e.2021.04.035 . |
| GAO T T, SHI Z Z, YANG X, et al. Assessment and cogitation of VR technique in gynaecological laparoscopic surgery training[J]. Med Educ Res Pract, 2021, 29(4):642-645. DOI: 10.13555/j.cnki.c.m.e.2021.04.035 . | |
| [28] | GHOLIZADEH M, BAKHSHALI M A, MAZLOOMAN S R, et al. Minimally invasive and invasive liver surgery based on augmented reality training: a review of the literature[J]. J Robot Surg, 2023, 17(3):753-763. DOI: 10.1007/s11701-022-01499-2 . |
| [29] | GROSSI S, CATTONI M, ROTOLO N, et al. Video-assisted thoracoscopic surgery simulation and training: a comprehensive literature review[J]. BMC Med Educ, 2023, 23(1):535. DOI: 10.1186/s12909-023-04482-z . |
| [30] | VERHEY J T, HAGLIN J M, VERHEY E M, et al. Virtual, augmented, and mixed reality applications in orthopedic surgery[J]. Int J Med Robot, 2020, 16(2): e2067. DOI: 10.1002/rcs.2067 . |
| [31] | GREENFIELD M J, LUCK J, BILLINGSLEY M L, et al. Demonstration of the effectiveness of augmented reality telesurgery in complex hand reconstruction in Gaza[J]. Plast Reconstr Surg Glob Open, 2018, 6(3): e1708. DOI: 10.1097/GOX.0000000000001708 . |
| [32] | 李晔. 可穿戴混合现实全息影像技术在辅助脑内血肿快速定位穿刺教学中的应用评价[J]. 中国医学教育技术, 2023, 37(4):474-478. DOI: 10.13566/j.cnki.cmet.cn61-1317/g4.202304018 . |
| LI Y. Evaluation of the application of wearable mixed reality holographic imaging technology in the teaching of Rapid Localization and Puncture of Intracerebral Hemorrhage[J]. China Med Educ Technol, 2023, 37(4):474-478. DOI: 10.13566/j.cnki.cmet.cn61-1317/g4.202304018 . | |
| [33] | 樊雅, 柏晓玲, 成忠莎, 等. 医务人员对基于混合现实技术构建重大传染病疫情防控培训平台态度的质性研究[J]. 预防医学论坛, 2023, 29(3):177-180. DOI: 10.16406/j.pmt.issn.1672-9153.2023.3.04 . |
| FAN Y, BAI X L, CHENG Z S, et al. The attitudes of medical staff on the construction of major epidemics prevention and control training platform based on mixed reality technology: a qualitative study[J]. Prev Med Tribune, 2023, 29(3):177-180. DOI: 10.16406/j.pmt.issn.1672-9153.2023.3.04 . | |
| [34] | ALVAREZ-LOPEZ F, MAINA M F, SAIGÍ-RUBIÓ F. Use of a low-cost portable 3D virtual reality gesture-mediated simulator for training and learning basic psychomotor skills in minimally invasive surgery: development and content validity study[J]. J Med Internet Res, 2020, 22(7): e17491. DOI: 10.2196/17491 . |
| [35] | CZUBALA M A, EILLES E, STAUBI A, et al. 3R Blackboard: a platform for animal and organ sharing[J]. Lab Anim, 2022, 56(3):292-296. DOI: 10.1177/00236772211067456 . |
| [36] | RUNFT S, FÄRBER I, KRÜGER J, et al. Alternatives to animal models and their application in the discovery of species susceptibility to SARS-CoV-2 and other respiratory infectious pathogens: a review[J]. Vet Pathol, 2022, 59(4):565-577. DOI: 10.1177/03009858211073678 . |
| [37] | BLEIJS M, VAN DE WETERING M, CLEVERS H, et al. Xenograft and organoid model systems in cancer research[J]. EMBO J, 2019, 38(15): e101654. DOI: 10.15252/embj.2019101654 . |
| [38] | YI S A, ZHANG Y X, RATHNAM C, et al. Bioengineering approaches for the advanced organoid research[J]. Adv Mater, 2021, 33(45): e2007949. DOI: 10.1002/adma.202007949 . |
| [39] | RINWA P, ERIKSSON M, COTGREAVE I, et al. 3R-Refinement principles: elevating rodent well-being and research quality[J]. Lab Anim Res, 2024, 40(1):11. DOI: 10.1186/s42826-024-00198-3 . |
| [40] | DÍAZ L, ZAMBRANO E, FLORES M E, et al. Ethical considerations in animal research: the principle of 3R's[J]. Rev Invest Clin, 2020, 73(4):199-209. DOI: 10.24875/RIC. 20000380 . |
| [41] | SNEDDON L U, HALSEY L G, BURY N R. Considering aspects of the 3Rs principles within experimental animal biology[J]. J Exp Biol, 2017, 220(Pt 17):3007-3016. DOI: 10.1242/jeb.147058 . |
| [42] | BECKER K. Animal welfare aspects in planning and conducting experiments on rodent models of subarachnoid hemorrhage[J]. Cell Mol Neurobiol, 2023, 43(8):3965-3981. DOI: 10.1007/s10571-023-01418-5 . |
| [43] | NEVES M M, KLEIN S G, SILVA R C, et al. Impact of quality and transparency in scientific writing on the reduction of animal usage in experimental protocols: a review based in pertinent literature[J]. Front Vet Sci, 2024, 11:1394113. DOI: 10.3389/fvets.2024.1394113 . |
| [1] | WANG Ying, JI Wentao, XU Shaoqiong, CHEN Guoyuan, FENG Jie, WU Baojin. Monitoring and Analysis of Environmental Microbial Contamination in Laboratory Animal Barrier Facilities [J]. Laboratory Animal and Comparative Medicine, 2026, 46(2): 222-230. |
| [2] | XIAO Fangping, XIONG Lijuan, JIA Bo, LIU Huan, LUO Yongbing, WAN Xiaorong. Analysis of Microbiological and Parasitic Testing Results for Laboratory Animals in Jiangxi Province, 2020-2024 [J]. Laboratory Animal and Comparative Medicine, 2026, 46(1): 119-126. |
| [3] | LI Xiaoqin, YU Wenlan, DUAN Yizhu, LIU Zhonghua, WU Guodong, SHI Wenqi, FU Hongkun. Construction of Laboratory Animal Science and Technology Ethics Governance System in China and Its Preliminary Practice in Guangdong Province [J]. Laboratory Animal and Comparative Medicine, 2026, 46(1): 127-137. |
| [4] | LIU Song, MO Qianru, WANG Jin, CUI Ying, TIAN Ling. Main Biological Characteristics of Hermetia illucens L. and Its Potential Applications as a Model Organism [J]. Laboratory Animal and Comparative Medicine, 2025, 45(6): 803-809. |
| [5] | LEI Linbei, WAN Xiaojuan, XIE Jing, LIU Yuxin, ZOU Jiexin, XIE Xianbing. Applications, Advantages, and Challenges of Germ-Free Bees in Biomedical Research [J]. Laboratory Animal and Comparative Medicine, 2025, 45(6): 784-793. |
| [6] | NIE Yongqiang, WANG Zhaoxia. Exploration and Practice of Building a One-Stop Service Platform for Gene-Edited Mice in University Animal Centers: A Case Study of Shanghai Jiao Tong University [J]. Laboratory Animal and Comparative Medicine, 2025, 45(5): 642-648. |
| [7] | LIU Wei, XU Zhongkan, HOU Fengtian, ZHANG Xinyan, QIAO Han, MA Liying. Evaluation Report on Animal Illuminance Detection Capability of Various Laboratory Animal Facility Testing Institutions in 2024 [J]. Laboratory Animal and Comparative Medicine, 2025, 45(5): 634-641. |
| [8] | WANG Tingjun, LUO Hao, CHEN Qi. Discussion on AI-Based Digital Upgrade and Application Practice of Laboratory Animal Centers [J]. Laboratory Animal and Comparative Medicine, 2025, 45(4): 473-482. |
| [9] | LIU Wentao, LUO Yanhong, LONG Yongxia, LUO Qihui, CHEN Zhengli, LIU Lida. Common Environmental Problems and Testing Experiences in Laboratory Animal Facilities in Sichuan Province [J]. Laboratory Animal and Comparative Medicine, 2025, 45(4): 483-489. |
| [10] | JIAO Qingzhen, WU Guihua, TANG Wen, FAN Fan, FENG Kai, YANG Chunxiang, QIAO Jian, DENG Sufang. Dynamic Monitoring and Analysis of Ammonia Concentration in Laboratory Animal Facilities Under Suspension of Heating Ventilation and Air Conditioning System [J]. Laboratory Animal and Comparative Medicine, 2025, 45(4): 490-495. |
| [11] | SHEN Huangyi, HUANG Yufei, YANG Yunpeng. Research Progress on Characteristics Analysis of Gut Microbiota and Its Sex Differences in Laboratory Animals [J]. Laboratory Animal and Comparative Medicine, 2025, 45(3): 349-359. |
| [12] | TAN Dengxu, MA Yifan, LIU Ke, ZHANG Yanying, SHI Changhong. Reshaping Intercellular Interactions: Empowering the Exploration of Disease Mechanisms and Therapies Using Organoid Co-Culture Models [J]. Laboratory Animal and Comparative Medicine, 2025, 45(3): 309-317. |
| [13] | SHAO Qiming, BIAN Yong, SHI Aimin. Key Points for Establishing Occupational Health and Safety Management System in Laboratory Animal Institutions [J]. Laboratory Animal and Comparative Medicine, 2025, 45(2): 188-196. |
| [14] | ZHANG Qian, DENG Qingxiu, CAI Lin. Review on Occupational Health Risk Prevention and Control for Laboratory Animal Practitioners in Chinese General Universities [J]. Laboratory Animal and Comparative Medicine, 2025, 45(2): 206-213. |
| [15] | XU Chao, SUN Qiufang, SHAO Qiming. Establishment of Occupational Health Related Files in Laboratory Animal Institutions [J]. Laboratory Animal and Comparative Medicine, 2025, 45(2): 214-220. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||